
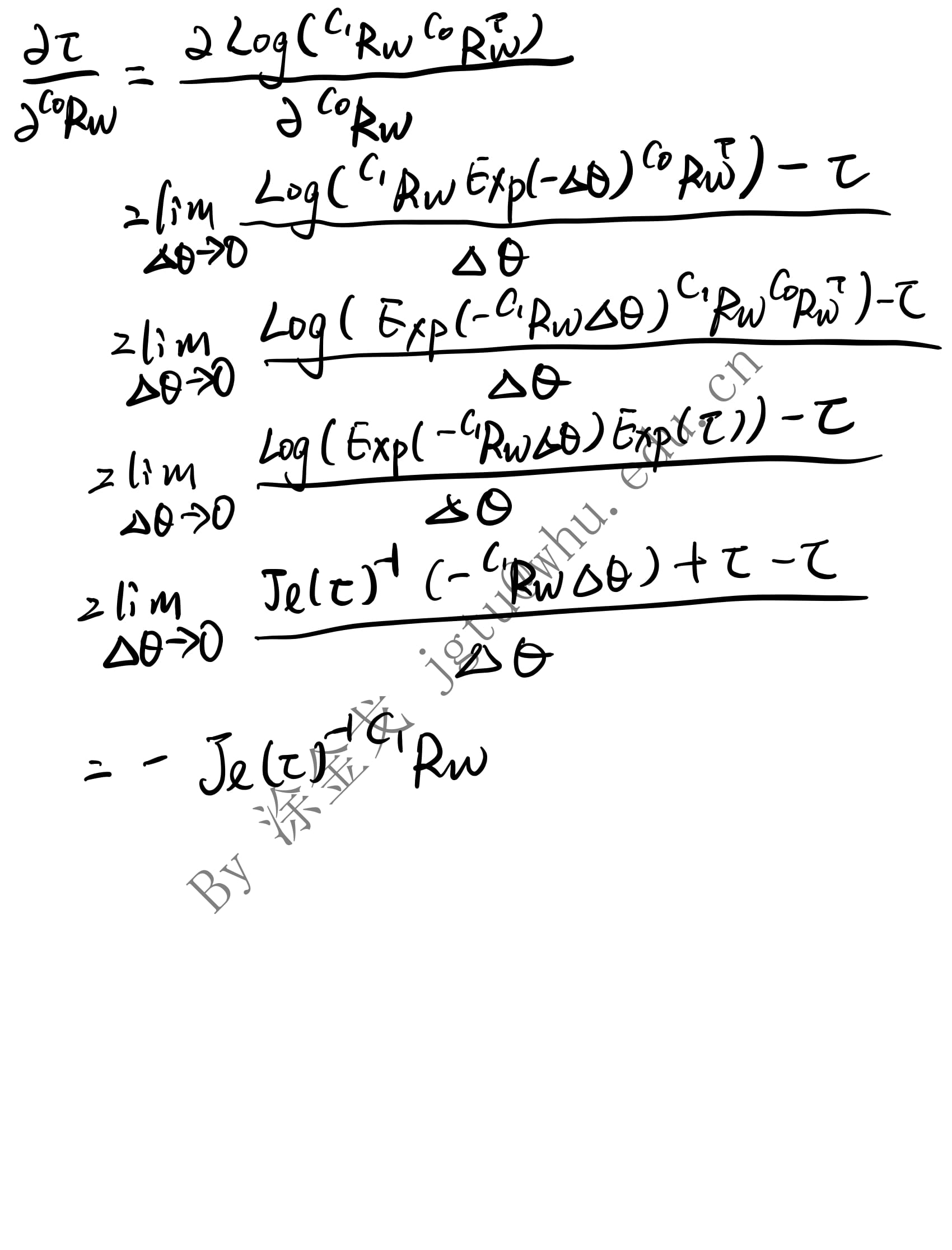
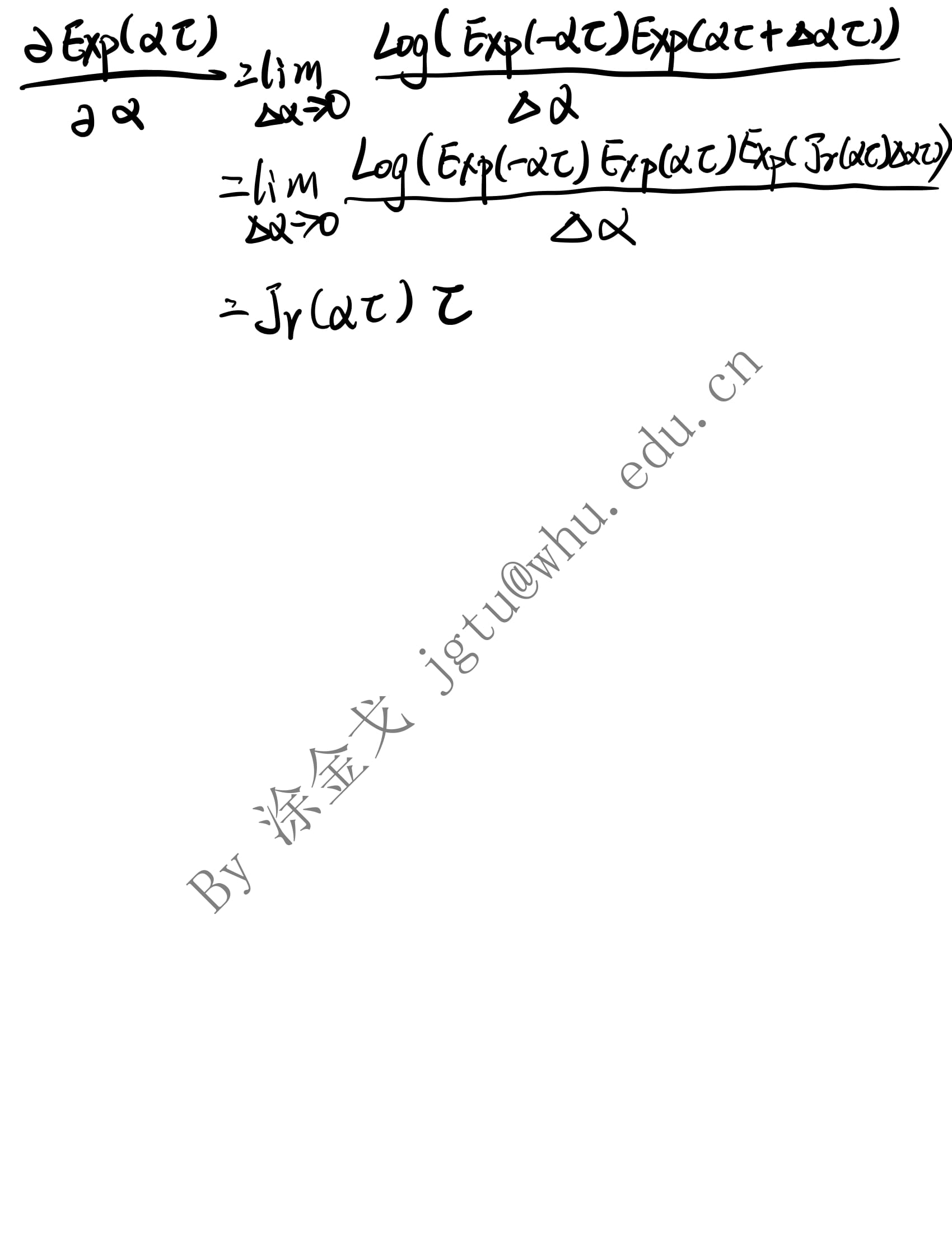
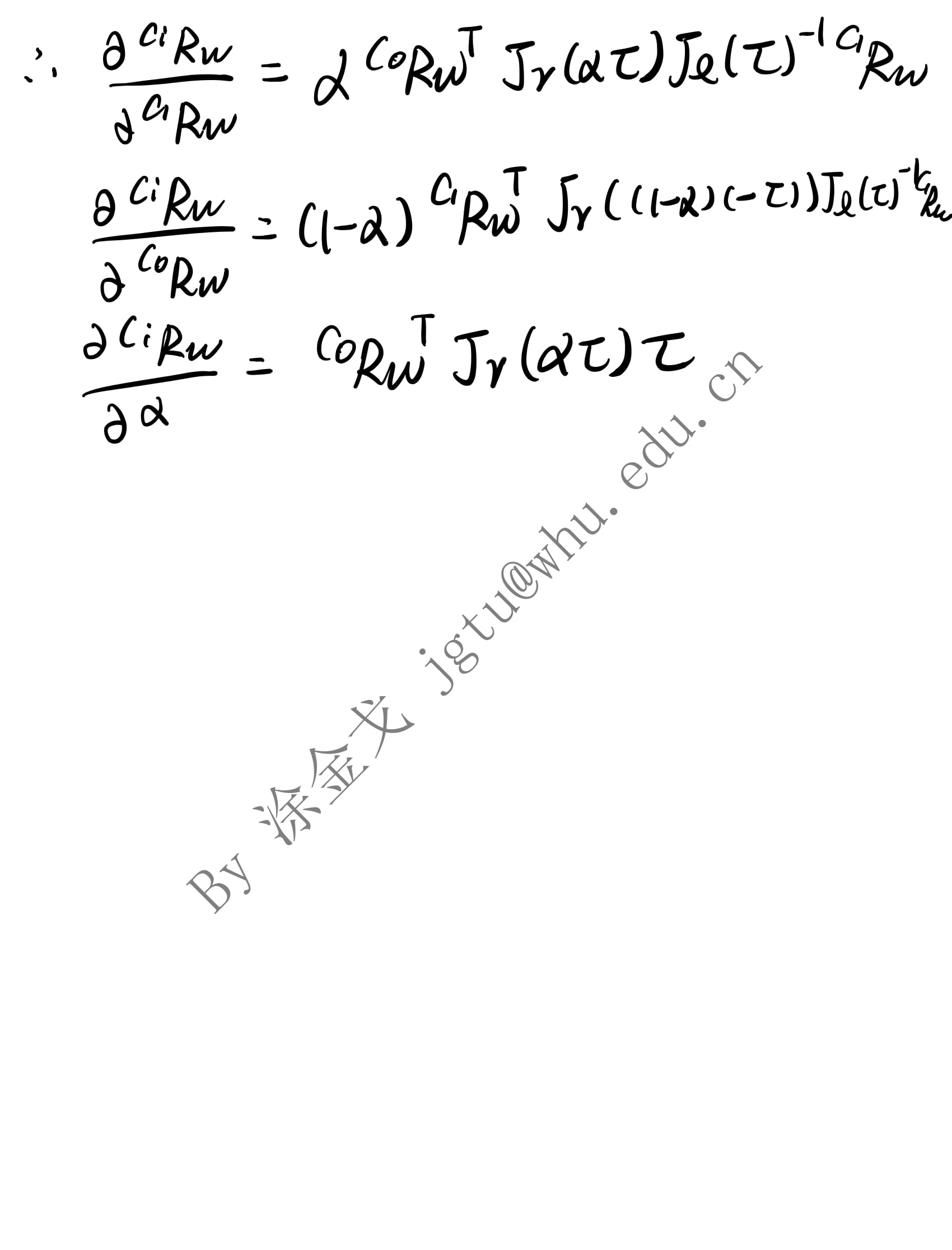
使用右扰动的方式计算 SLERP 的雅克比。是 SLERP Jacobians (left perturb) 的补充。
1. 推导


2. 验证
使用 ceres-solver 1.14.0 。
代码如下:
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <ceres/internal/autodiff.h>
#include <ceres/internal/numeric_diff.h>
#include <cstdlib>
#include <ctime>
/// use numeric diff and auto diff to check my analytic diff.
class QuaternionCostFunctor {
public:
QuaternionCostFunctor(const Eigen::Quaterniond &_ci_q_w) : ci_q_w_{_ci_q_w} {}
template <typename T>
bool operator()(const T *const _c0_q_w, const T *const _c1_q_w,
const T *const _alpha, T *_e) const {
const Eigen::Quaternion<T> c0_q_w(_c0_q_w);
const Eigen::Quaternion<T> c1_q_w(_c1_q_w);
const Eigen::Quaternion<T> delta_qua =
c1_q_w * c0_q_w.inverse(); // This direction is important, meeting the
// substraction of right perturbation.
Eigen::AngleAxis<T> delta_aa(delta_qua);
delta_aa.angle() *= _alpha[0];
const Eigen::Quaternion<T> ci_q_w_p =
Eigen::Quaternion<T>(delta_aa) * c0_q_w;
const Eigen::Quaternion<T> ci_q_w(
static_cast<T>(ci_q_w_.w()), static_cast<T>(ci_q_w_.x()),
static_cast<T>(ci_q_w_.y()), static_cast<T>(ci_q_w_.z()));
const Eigen::Quaternion<T> e_q = ci_q_w.inverse() * ci_q_w_p;
const Eigen::AngleAxis<T> e_aa(e_q);
Eigen::Map<Eigen::Matrix<T, 3, 1>> e(_e);
e = e_aa.axis() * e_aa.angle();
return true;
}
void evaluateAnalytically(const double *const _c0_q_w,
const double *const _c1_q_w,
const double *const _alpha, double *_e,
double **_jacobians) const {
const Eigen::Quaternion<double> c0_q_w(_c0_q_w);
const Eigen::Quaternion<double> c1_q_w(_c1_q_w);
const Eigen::Quaternion<double> delta_qua =
c1_q_w * c0_q_w.inverse(); // This direction is important, meeting the
// substraction of right perturbation.
Eigen::AngleAxis<double> delta_aa(delta_qua);
delta_aa.angle() *= _alpha[0];
const Eigen::Quaternion<double> ci_q_w_p =
Eigen::Quaternion<double>(delta_aa) * c0_q_w;
const Eigen::Quaternion<double> e_q = ci_q_w_.inverse() * ci_q_w_p;
const Eigen::AngleAxis<double> e_aa(e_q);
Eigen::Map<Eigen::Matrix<double, 3, 1>> e(_e);
e = e_aa.axis() * e_aa.angle();
if (_jacobians != nullptr) {
const Eigen::Vector3d tau_axis = delta_aa.axis();
const double tau_angle = delta_aa.angle() / _alpha[0];
if (_jacobians[0] != nullptr) { /// c0_q_w
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> J(
_jacobians[0]);
J.setZero();
J.block(0, 0, 3, 3) =
(1 - _alpha[0]) * c1_q_w.inverse().toRotationMatrix() *
J_r((1 - _alpha[0]) * -tau_angle, tau_axis) *
J_l_inv(tau_angle, tau_axis) * c1_q_w.toRotationMatrix();
}
if (_jacobians[1] != nullptr) { /// c1_q_w
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> J(
_jacobians[1]);
J.setZero();
J.block(0, 0, 3, 3) = _alpha[0] * c0_q_w.inverse().toRotationMatrix() *
J_r(_alpha[0] * tau_angle, tau_axis) *
J_l_inv(tau_angle, tau_axis) *
c1_q_w.toRotationMatrix();
}
if (_jacobians[2] != nullptr) { /// alpha
Eigen::Map<Eigen::Matrix<double, 3, 1>> J(_jacobians[2]);
J = c0_q_w.inverse().toRotationMatrix() *
J_r(_alpha[0] * tau_angle, tau_axis) * tau_angle * tau_axis;
}
}
}
static bool GlobalToLocal(const double *x, double *jacobian) {
const double qw = x[3];
const double qx = x[0];
const double qy = x[1];
const double qz = x[2];
jacobian[0] = qw * 0.5, jacobian[1] = -qz * 0.5, jacobian[2] = qy * 0.5;
jacobian[3] = qz * 0.5, jacobian[4] = qw * 0.5, jacobian[5] = -qx * 0.5;
jacobian[6] = -qy * 0.5, jacobian[7] = qx * 0.5, jacobian[8] = qw * 0.5;
jacobian[9] = -qx * 0.5, jacobian[10] = -qy * 0.5, jacobian[11] = -qz * 0.5;
return true;
}
static inline Eigen::Matrix3d skew(const Eigen::Vector3d &_v) {
Eigen::Matrix3d res;
res.setZero();
res(0, 1) = -_v[2], res(0, 2) = _v[1], res(1, 2) = -_v[0];
res(1, 0) = _v[2], res(2, 0) = -_v[1], res(2, 1) = _v[0];
return res;
}
static Eigen::Matrix3d J_l(const double _angle,
const Eigen::Vector3d &_axis) {
/// (145)
Eigen::Matrix3d res =
Eigen::Matrix3d::Identity() +
(1 - std::cos(_angle)) / (_angle * _angle) * skew(_angle * _axis) +
(_angle - std::sin(_angle)) / (_angle * _angle * _angle) *
skew(_angle * _axis) * skew(_angle * _axis);
return res;
}
static Eigen::Matrix3d J_l_inv(const double _angle,
const Eigen::Vector3d &_axis) {
/// (146)
Eigen::Matrix3d res =
Eigen::Matrix3d::Identity() - 0.5 * skew(_angle * _axis) +
(1 / (_angle * _angle) -
(1 + std::cos(_angle)) / (2 * _angle * std::sin(_angle))) *
skew(_angle * _axis) * skew(_angle * _axis);
return res;
}
static Eigen::Matrix3d J_r(const double _angle,
const Eigen::Vector3d &_axis) {
return J_l(_angle, _axis).transpose();
/// (143)
Eigen::Matrix3d res =
Eigen::Matrix3d::Identity() -
(1 - std::cos(_angle)) / (_angle * _angle) * skew(_angle * _axis) +
(_angle - std::sin(_angle)) / (_angle * _angle * _angle) *
skew(_angle * _axis) * skew(_angle * _axis);
return res;
}
static Eigen::Matrix3d J_r_inv(const double _angle,
const Eigen::Vector3d &_axis) {
return J_l_inv(_angle, _axis).transpose();
/// (144)
Eigen::Matrix3d res =
Eigen::Matrix3d::Identity() + 0.5 * skew(_angle * _axis) +
(1 / (_angle * _angle) -
(1 + std::cos(_angle)) / (2 * _angle * std::sin(_angle))) *
skew(_angle * _axis) * skew(_angle * _axis);
return res;
}
private:
const Eigen::Quaterniond ci_q_w_;
};
Eigen::Quaterniond getRandomQuaternion() {
const double range = 1.;
Eigen::Vector3d axis(std::rand() / double(RAND_MAX) * 2 * range + (-range),
std::rand() / double(RAND_MAX) * 2 * range + (-range),
std::rand() / double(RAND_MAX) * 2 * range + (-range));
axis.normalize();
const double angle = std::rand() / double(RAND_MAX) * 2 * M_PI;
Eigen::AngleAxisd aa(angle, axis);
return Eigen::Quaterniond(aa);
}
int main(int argc, char **argv) {
std::srand(std::time(NULL));
std::srand(0);
Eigen::Quaterniond c0_q_w = getRandomQuaternion();
Eigen::Quaterniond c1_q_w = getRandomQuaternion();
double alpha = std::rand() / double(RAND_MAX);
std::cout << "c0_R_w:\n" << c0_q_w.toRotationMatrix() << std::endl;
std::cout << "c1_R_w:\n" << c1_q_w.toRotationMatrix() << std::endl;
std::cout << "alpha:\n" << alpha << std::endl;
const Eigen::Quaterniond delta_qua = c1_q_w * c0_q_w.inverse();
Eigen::AngleAxisd delta_aa(delta_qua);
delta_aa.angle() *= alpha;
const Eigen::Quaterniond ci_q_w = Eigen::Quaterniond(delta_aa) * c0_q_w;
std::cout << "ci_R_w:\n" << ci_q_w.toRotationMatrix() << std::endl;
QuaternionCostFunctor functor(ci_q_w);
double residuals[3];
double *parameters[3] = {c0_q_w.coeffs().data(), c1_q_w.coeffs().data(),
&alpha};
double **jacobians = new double *[3];
for (int i = 0; i < 2; ++i)
jacobians[i] = new double[12];
jacobians[2] = new double[3];
{
ceres::internal::AutoDiff<QuaternionCostFunctor, double, 4, 4,
1>::Differentiate(functor, parameters,
3, /// residual num
residuals, jacobians);
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_0(
jacobians[0]);
Eigen::Matrix<double, 4, 3, Eigen::RowMajor> global_to_local_0;
QuaternionCostFunctor::GlobalToLocal(parameters[0],
global_to_local_0.data());
std::cout << "autodiff jacobian_0:\n"
<< jacobian_0 * global_to_local_0 << std::endl;
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_1(
jacobians[1]);
Eigen::Matrix<double, 4, 3, Eigen::RowMajor> global_to_local_1;
QuaternionCostFunctor::GlobalToLocal(parameters[1],
global_to_local_1.data());
std::cout << "autodiff jacobian_1:\n"
<< jacobian_1 * global_to_local_1 << std::endl;
Eigen::Map<Eigen::Matrix<double, 3, 1>> jacobian_2(jacobians[2]);
std::cout << "autodiff jacobian_2:\n" << jacobian_2 << std::endl;
}
{
ceres::internal::NumericDiff<
QuaternionCostFunctor, ceres::NumericDiffMethodType::CENTRAL, 3, 4, 4,
1, 0, 0, 0, 0, 0, 0, 0, 0,
4>::EvaluateJacobianForParameterBlock(&functor, residuals,
ceres::NumericDiffOptions(),
3, /// residual num
0, /// block index
4, /// block size
parameters, jacobians[0]);
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_0(
jacobians[0]);
Eigen::Matrix<double, 4, 3, Eigen::RowMajor> global_to_local_0;
QuaternionCostFunctor::GlobalToLocal(parameters[0],
global_to_local_0.data());
std::cout << "numdiff jacobian_0:\n"
<< jacobian_0 * global_to_local_0 << std::endl;
}
{
ceres::internal::NumericDiff<
QuaternionCostFunctor, ceres::NumericDiffMethodType::CENTRAL, 3, 4, 4,
1, 0, 0, 0, 0, 0, 0, 0, 1,
4>::EvaluateJacobianForParameterBlock(&functor, residuals,
ceres::NumericDiffOptions(),
3, /// residual num
1, /// block index
4, /// block size
parameters, jacobians[1]);
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_1(
jacobians[1]);
Eigen::Matrix<double, 4, 3, Eigen::RowMajor> global_to_local_1;
QuaternionCostFunctor::GlobalToLocal(parameters[1],
global_to_local_1.data());
std::cout << "numdiff jacobian_1:\n"
<< jacobian_1 * global_to_local_1 << std::endl;
}
{
ceres::internal::NumericDiff<
QuaternionCostFunctor, ceres::NumericDiffMethodType::CENTRAL, 3, 4, 4,
1, 0, 0, 0, 0, 0, 0, 0, 2,
1>::EvaluateJacobianForParameterBlock(&functor, residuals,
ceres::NumericDiffOptions(),
3, /// residual num
2, /// block index
1, /// block size
parameters, jacobians[2]);
Eigen::Map<Eigen::Matrix<double, 3, 1>> jacobian_2(jacobians[2]);
std::cout << "numdiff jacobian_2:\n" << jacobian_2 << std::endl;
}
{
functor.evaluateAnalytically(parameters[0], parameters[1], parameters[2],
residuals, jacobians);
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_0(
jacobians[0]);
Eigen::Map<Eigen::Matrix<double, 3, 4, Eigen::RowMajor>> jacobian_1(
jacobians[1]);
Eigen::Map<Eigen::Matrix<double, 3, 1>> jacobian_2(jacobians[2]);
std::cout << "analytic jacobian_0:\n"
<< jacobian_0.block(0, 0, 3, 3) << std::endl;
std::cout << "analytic jacobian_1:\n"
<< jacobian_1.block(0, 0, 3, 3) << std::endl;
std::cout << "analytic jacobian_2:\n" << jacobian_2 << std::endl;
}
return 0;
}
3. 用 Conan 解决依赖
conanfile.txt:
[requires]
ceres-solver/1.14.0
[generators]
cmake
CMakeLists.txt:
cmake_minimum_required(VERSION 3.5)
project(helloworld)
include(${CMAKE_BINARY_DIR}/conanbuildinfo.cmake)
conan_basic_setup()
include_directories(${EIGEN3_INCLUDE_DIR})
add_executable(left left.cc)
target_link_libraries(left ${CONAN_LIBS})
add_executable(right right.cc)
target_link_libraries(right ${CONAN_LIBS})
原文地址:http://www.cnblogs.com/JingeTU/p/16818250.html
1. 本站所有资源来源于用户上传和网络,如有侵权请邮件联系站长!
2. 分享目的仅供大家学习和交流,请务用于商业用途!
3. 如果你也有好源码或者教程,可以到用户中心发布,分享有积分奖励和额外收入!
4. 本站提供的源码、模板、插件等等其他资源,都不包含技术服务请大家谅解!
5. 如有链接无法下载、失效或广告,请联系管理员处理!
6. 本站资源售价只是赞助,收取费用仅维持本站的日常运营所需!
7. 如遇到加密压缩包,默认解压密码为"gltf",如遇到无法解压的请联系管理员!
8. 因为资源和程序源码均为可复制品,所以不支持任何理由的退款兑现,请斟酌后支付下载
声明:如果标题没有注明"已测试"或者"测试可用"等字样的资源源码均未经过站长测试.特别注意没有标注的源码不保证任何可用性