
过程控制系统笔记
第一章 单回路反馈控制系统
单回路系统结构组成
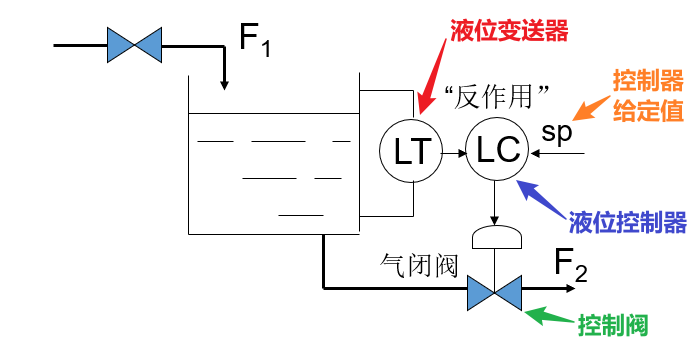
举例–水槽液位控制系统
单回路控制系统方框图
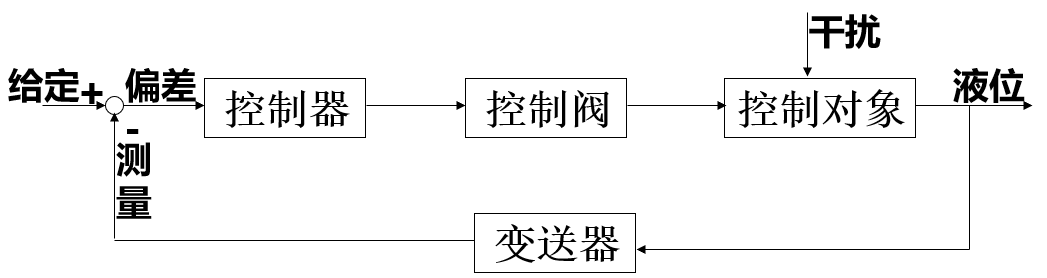

各环节增益注意点:
- 控制器: 正作用: 增益为-; 负作用: 增益为+
- 控制阀: 气开阀: 增益为+; 气闭阀: 增益为-
- 变送器: 一般为+
- 控制对象: 根据操纵变量Q(S)的变化引起被控变量Y(S)的变化确定. Q(s)↑👉Y(s)↑增益为+
符号: 由于是负反馈系统, 因此闭环系统各环节的增益乘积必须为+
单回路反馈控制系统特点
- 由一个测量变送装置, 一个控制器, 一个控制阀, 相应的被控对象组成
- 系统中控制器是根据被控变量的测量值与给定值的偏差进行控制( error = 测量值 – 给定值)
被控变量选择
选择方法
- 对于以温度, 压力, 流量, 液位为操作指标的生产过程, 直接选;
- 若选择质量指标作为被控变量, 若不方便测量, 可选间接指标作为被控变量. (要求: 1间接指标与直接指标之间存在单值对应关系; 2具有一定变化灵敏度)
原则
- 首选质量指标
- 用间接指标反映质量指标(单值对应)
- 间接指标参数有足够大的变化灵敏度
- 考虑工艺合理性
对象特性对控制质量的影响及操纵变量的选择
对象特性(干扰通道和控制通道)对控制质量的影响
| 干扰通道 | 控制通道 | |
|---|---|---|
| K(放大倍数) | 小, 越小越好 | 尽可能地大 |
| T(时间常数) | 大, 越大越好 | 适当地小 |
| \(\tau\)(纯滞后) | 无关 | 小, 越小越好 |
操作变量选择
- 所选的操纵变量必须是可控的;
- 所选的操纵变量的通道放大倍数应较大,最好大于干扰通道的放大倍数;
- 所选的操纵变量应使扰动时间常数愈大愈好,而控制通道的时间常数适当小一些为好,但不宜过小;
- 操纵变量其通道纯滞后时间愈小愈好;
- 操纵变量应使干扰点远离被控变量而靠近控制阀;
- 选择操纵变量时还应考虑到工艺的合理性。
控制阀的选择
开闭形式选择原则
- 首先从安全生产出发
- 考虑介质特性
- 考虑减少经济损失
- 保证产品质量
举例
-
生产安全

从保护锅炉出发,应选用气闭阀;从保护后续设备出发,应选用气开阀。主要要分清主次矛盾。
-
介质特点
被加热物料在温度过高时会发生分解、自聚, 在温度过低时会发生凝结
-
降低经济损失, 保证产品质量
控制阀结构形式的选择
- 直通单座: 阀前后压降低, 适用于泄漏量小的场合
- 直通双座: 阀前后压降大, 适用于泄漏量大的场合
阀门定位器的作用
- 消除控制阀膜头和弹簧的不稳定以及各运动部件的干摩擦,从而提高控制阀的精度和可靠性,实现准确定位。
- 增大执行机构的输出功率,减少系统的传递滞后。
- 改变控制阀的流量特性。
- 利用阀门定位器可将控制器输出信号分段,以实现分程控制。
控制器参数对控制质量的影响及控制规律的选择
控制器参数对系统动态误差的影响
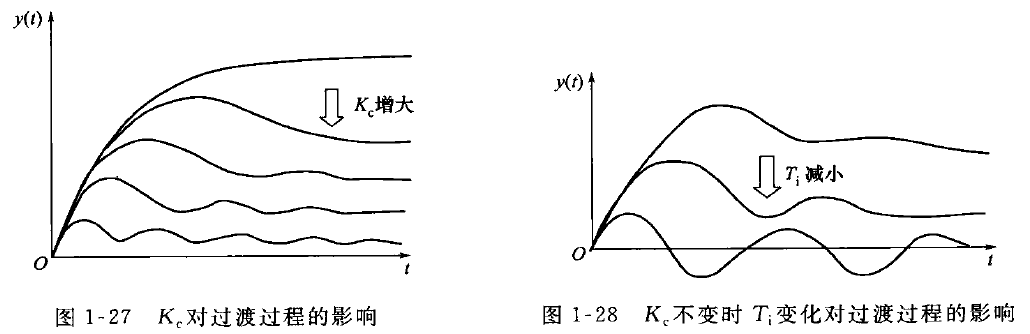
控制规律的选择
P: 适用于干扰变化幅度小,自衡能力强,对象滞后(τ∕T )较小,控制质量要求不高,且系统允许有一定范围余差的场合。
PI: 工艺要求静态无余差,控制对象容量滞后很小,负荷变化幅度较大,但变化过程又较缓慢的场合。
PD: 适用于控制对象T0较大的场合。对于滞后很小,信号有噪声或周期性干扰的系统不能采用微分作用。
PID: 适用于负荷变化和对象容量滞后都较大、时滞不太大且控制质量要求又较高,被控变量变化缓慢的场合。
第二章 串级控制系统
概念
定义
串级控制系统:用两台控制器相串接,一个控制器的输出作为另一个控制器的输入。
常用名词
-
主被控变量(主参数, 主变量)
-
附被控变量(副参数, 副变量)
-
主控制器
-
副控制器
-
主回路(主环)
-
副回路(副环)
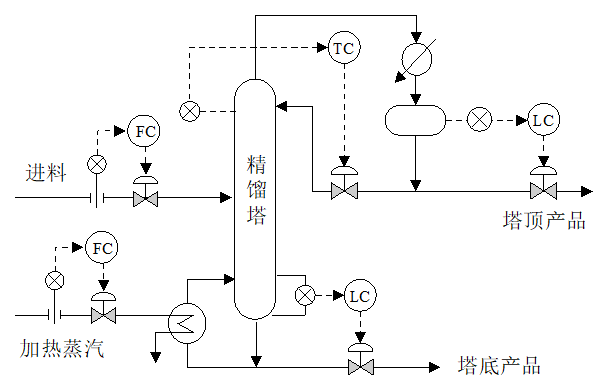
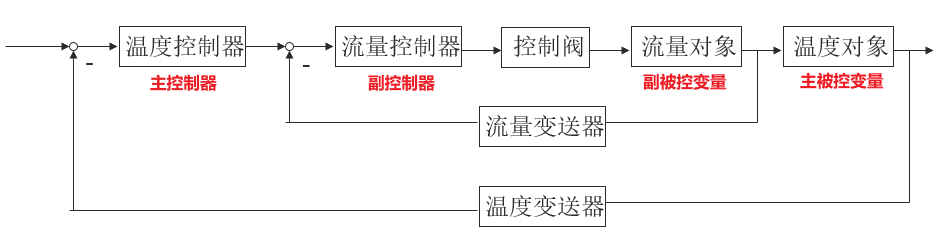
举例——串级控制系统方案(温度-流量)
串级控制系统的实施
考虑以下几个问题
-
所选用的仪表信号必须匹配
-
所选用的副控制器必须具有外给定输入接口
-
在选择实施方案时, 应是否增加一只切换开关, 作”串级”与”主控”的切换作用
-
实施方案应力求实用, 少花钱多办事
-
实施方案应便于操作
主, 副控制器控制规律的选择
-
主回路 (定值系统)
主回路是一个定值系统,主控制器起着定值控制作用。保持主变量的稳定是首要任务,主控制器必须有积分作用,因此采用PI或PID
-
副回路 (随动系统)
副回路是一个随动系统,它的给定值随主控制器输出的变化而变化,为了能快速跟踪,副控制器一般不用积分作用,采用P或者PD(副对象的容量滞后T较大)
注意: 当主, 副控制器采用积分作用时:
- 只有当主控制器采用具有积分作用的控制器时,不论干扰在副回路还是主回路,都能保证主变量无余差。
- 当副控制器有积分作用时而主控制器无积分作用时,只有干扰作用于副回路,主变量无余差;干扰作用于主回路,主变量仍然存在余差。
主, 副控制器正反作用的选择
注: 先副后主
-
副控制器
副控制器的正、反作用要根据副回路的具体情况决定,而与主回路无关。副环可以按照单回路控制系统确定正、反作用的方法来确定副控制器的正、反作用
-
主控制器
主控制器的正、反作用根据主回路所包括的各环节来确定。副回路的放大倍数可视为“正”,因变送器一般为“正”,这样主控制器的正负特性与主对象的正负特性一样
控制对象正负特性
-
压力对象
检测环节在控制阀后面: “+”
检测环节在控制阀前面: “-”
-
温度对象
根据操纵变量Q(S)的变化引起被控变量Y(S)的变化确定. Q(s)↑👉Y(s)↑增益为+
例题
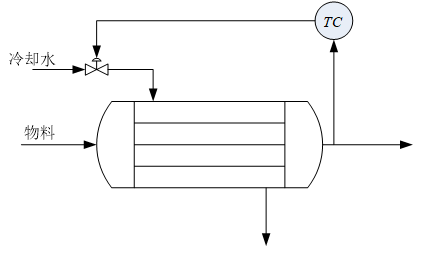
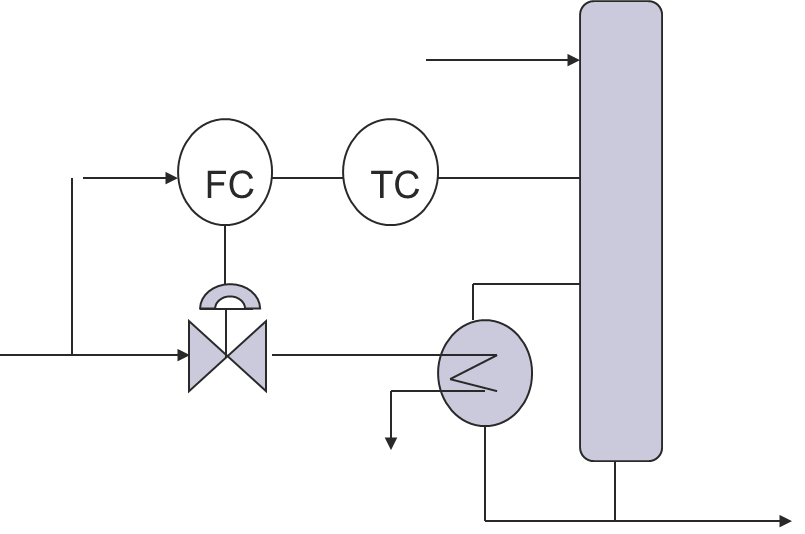
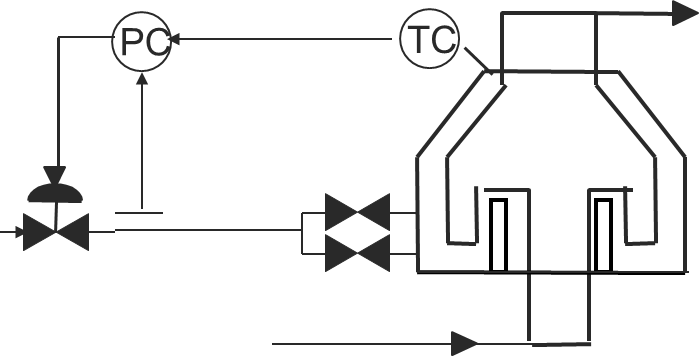
例1: 确定下图所示加热炉出口温度与燃料油压力串级控制系统主、 副控制器的正反作用
-
绘制结构图
-
副环: 控制阀应选气开(正特性)→副对象放大倍数为正特性→副变送器放大倍数为正特性→副控制器应为正特性(选反作用)
-
主环: 主对象放大倍数为正特性→主控制器应选反作用(主控制器放大倍数应取主对象放大倍数的特性符号)
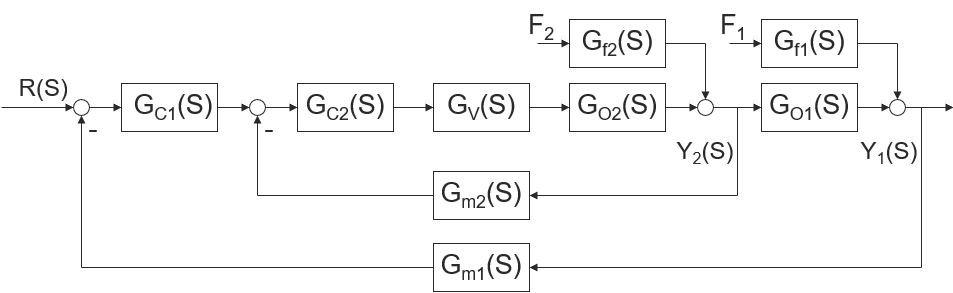
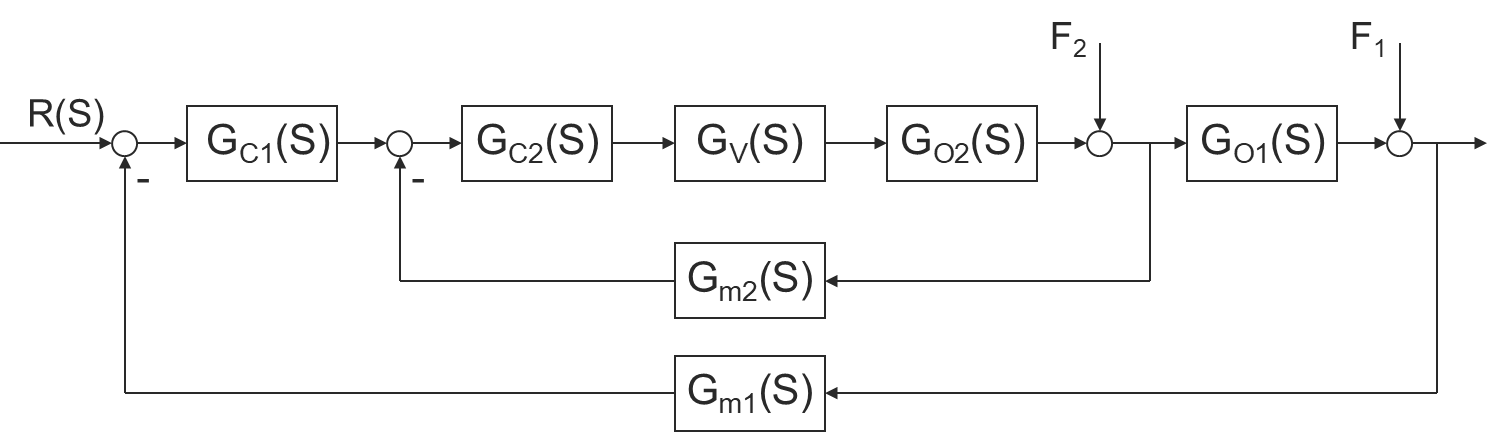
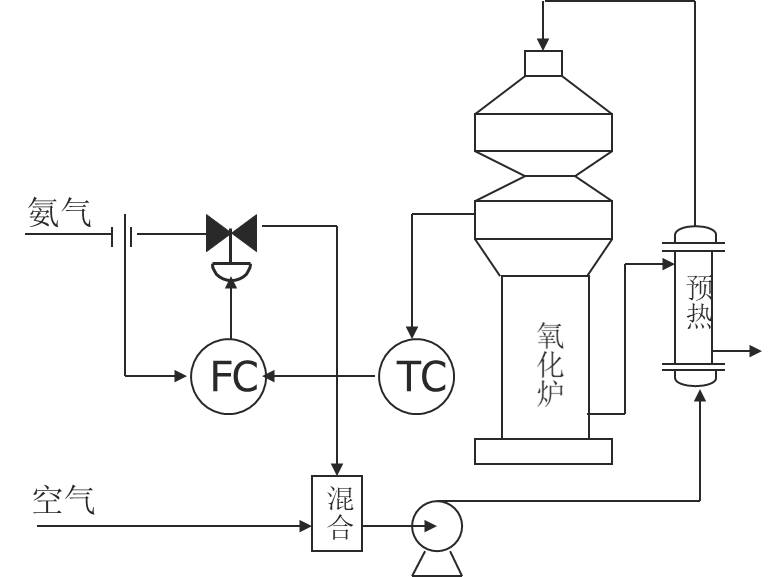
例2: 氧化炉温度与氨气流量的串级控制系统主、 副控制器的正反作用(氨气流量变化1%,氧化炉温度改变64℃ )
-
GO1(S): +, GO2(S): +, GV(S): +, GC2(S): +, GC1(S): +
-
TC: 反作用, FC: 反作用
-
注意:
- 结构图(带控制点的工艺流程图)≠方框图
串级控制系统的投运和整定
投运
-
投运顺序: 先副环, 后主环
-
无扰动切换: 预置给定等于测量
注意: 投运过程中应切除微分作用
整定
串级控制系统的特点
- 由于副回路的存在,改善了对象的特性使系统的工作频率提高;
- 串级控制回路具有较强的抗干扰能力;
- 串级控制系统具有一定的自适应能力.
串级系统副回路设计
原则
-
使系统主要干扰包含在副环内;
-
在可能情况下,应使副环包含更多一些的干扰;
-
当对象具有非线性环节时,在设计时应使非线性环节于副环之中;
-
当对象具有较大纯滞后时,在设计时应使副回路尽量少包括或不包括纯滞后;
-
副回路设计时应考虑主、副对象时间常数的匹配,以防共振;
-
所设计的副回路需考虑到方案的经济性和工艺的合理性
举例: 加热炉出口温度控制
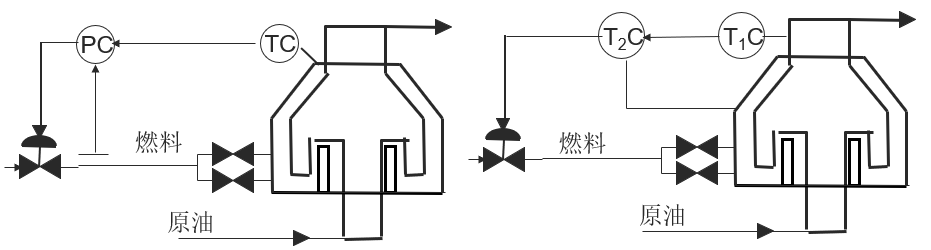
主要干扰:
-
燃料气压力
-
燃料气热值
-
燃料效果
-
环境温度
-
原油流量
-
原油温度
第三章 比值控制系统
考核点
- 比值控制系统的类型
- 比值, 比值系数两者关系
- 设计方案, 方框图, 控制阀, 控制器的正反作用
- 方案实施{相乘, 相除}, 比值系数的设定
- 逻辑比值控制系统(工作过程分析)
概述
比值控制系统: 实现两个或两个以上参数符合一定的比例关系的控制系统
主动量: 需要保持比值关系的两种物料中,处于主导地位物料,称之为主动量
从动量: 按主物量进行配比变化的物料,在控制过程中随主物料而变化,称之为从动量
比值控制系统就是要实现副流量F2 和主流量F1 成比值关系 $$ K=\frac{F_2}{F_1} $$ ,K为副流量与主流量的流量比值
比值控制系统的类型
开环比值控制系统
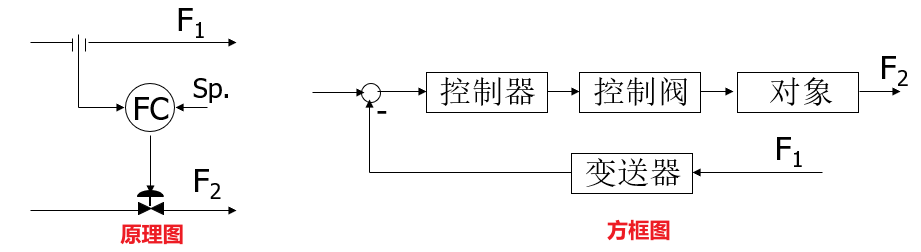
- 特点: 最简单的比值控制系统,同时也是开环控制系统。随着F1的变化,F2将跟着变化
- 缺点: 由于系统是开环的,对副流量F2的波动无法克服,比值精度低
单闭环比值控制系统
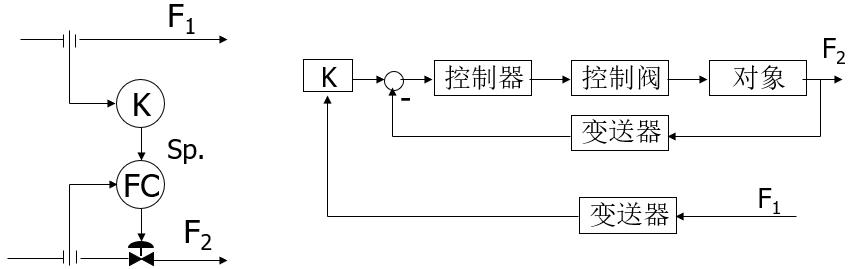
- 特点: 既实现副流量跟随主流量变化而变化,又可克服副流量本身干扰对比值的影响
- 缺点: 1. 由于主流量不受控制,所以总物料量不固定,不适合负荷变化幅度大的场合; 2. 无法保证动态比值
单闭环比值控制系统与串级控制系统的区别: 单闭环比值控制系统的主流量相当于串级控制系统的主参数,而主流量没有构成闭环系统,F2的变化并不影响F1
双闭环比值控制系统
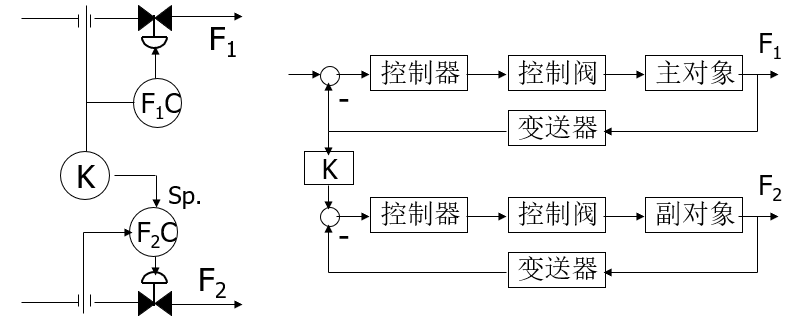
- 特点: 克服主流量干扰影响
- 缺点: 需要防止共振
其他类型的比值控制
- 变比值控制系统
- 串级和比值控制组合系统
原文地址:https://www.cnblogs.com/olioolii/p/16789457.html